Balls
balls balls balls
been thinkin bout balls recently.
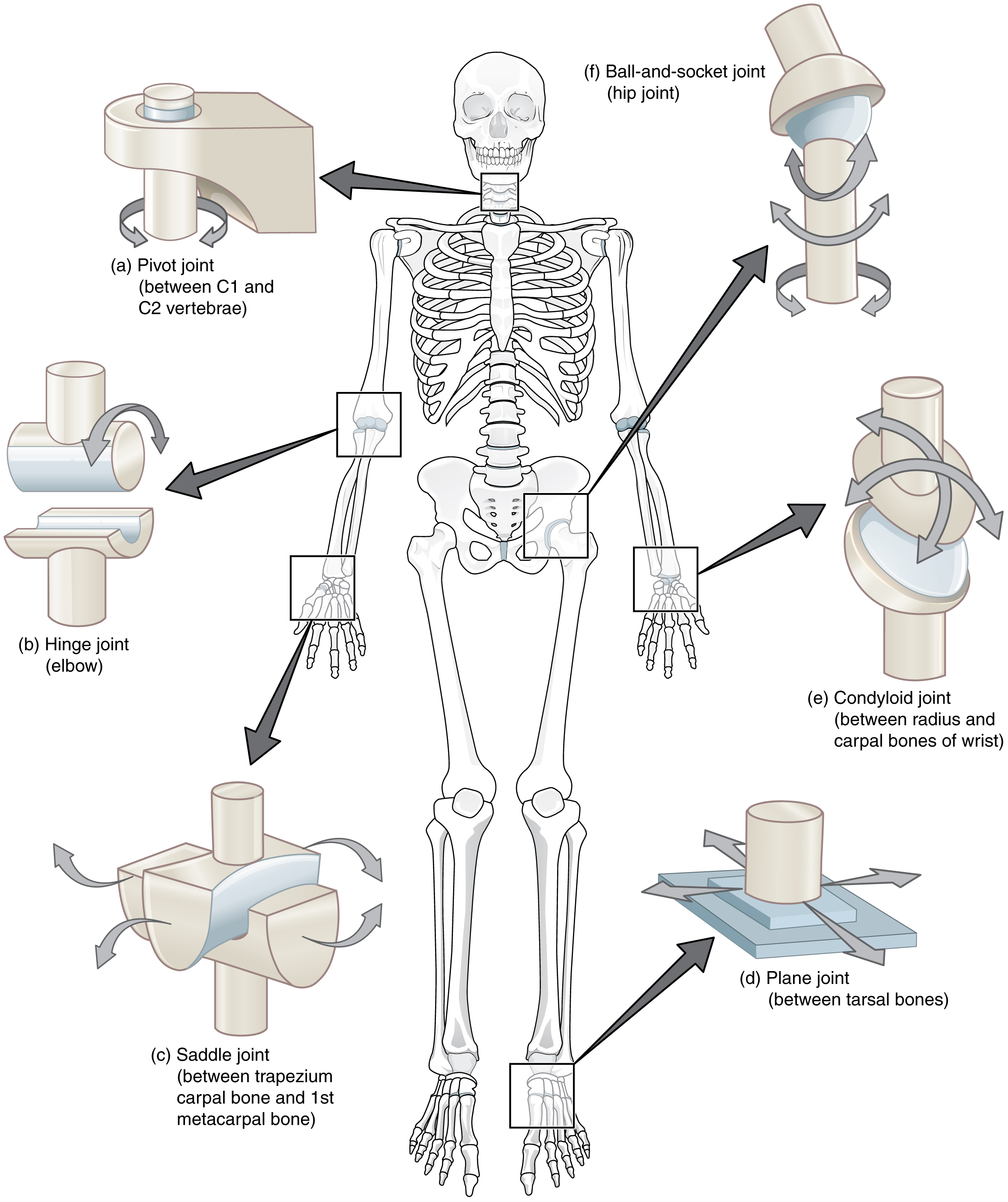
multiaxial joints are a type of synovial joint, including ball-and-socket joints, and are a useful feature of evolved chordate life dating back over 400 million years.
Often to move robot parts, we use servos of various strength/price/quality with an attached gear to move even more gears in different directions, but the servos themselves only operate on one axis of movement. To move something on a bounded 3D surface, we need to be more clever and there’s no generalized hardware solution.
The problem with robot joints is power delivery. The mechanism to move a joint often ends up located inside the joint itself containing motors and gears. If you want a robot to be strong, you have to make the joints big and heavy and loud and hot and power hungry (or drive the joints by cables actuated external to the joints, but then if you still need strong power you need heavy cables). The larger and more powerful an actuator needed for standard robot operations, the heavier and more expensive all the actuator components get.
Comparatively, nature figured out a solution by using various joint types including ball-and-socket joint combinations controlled by a fancy assortment of bone-attached-bands via ligaments and muscle insertions pushed and pulled from concentric-vs-eccentric contractions. Natural joints don’t store the energy inside the joint (except for rare things like grasshopper legs), but rather the joint motion control is distributed along energy stored in meat stored along the bones being manipulated.
{kind=link}
People have ideas about how to design and build actuators for multi-directional movements, but the most useful ones weigh 1 kg per joint and cost $600+ to build, which rules them out for every day robot operations where we’d want a nice robot body having 16 to 36 degrees of freedom:
Spherical Parallel Joint: https://www.youtube.com/watch?v=mQiPAUH1Vyc
Simulated ligaments: https://hackaday.com/2018/09/04/a-servo-powered-robotic-arm-but-like-youve-never-seen-before/
Spherical servo control: https://www.youtube.com/watch?v=FeUMAKdcA9Y / https://www.thingiverse.com/thing:4857920/files / https://journals.sagepub.com/doi/full/10.1177/1687814017721854
Bendy bot parts: https://www.youtube.com/watch?v=MxBeUQay8YM
Tri-servo spherical joint: https://www.youtube.com/watch?v=mQiPAUH1Vyc
Lego swivel joints: https://www.youtube.com/watch?v=fSMC4tfOqHM
Ribbed joint: https://www.youtube.com/watch?v=hhDdfiRCQS4
Rolling sphere joint: https://www.youtube.com/watch?v=tcDDDaSMW0I
Wrist weight reduction: https://www.youtube.com/watch?v=0hGy4AxUOnk
Angry Lego: https://www.youtube.com/watch?v=bOqQIfqfens
Magnetic gears: https://www.youtube.com/watch?v=DAWVetrtD9U / https://www.youtube.com/watch?v=uKdMJtdy8oE / https://www.youtube.com/watch?v=-Lel-MVAzTE / https://www.youtube.com/watch?v=eaMD_9kOlTA
quasi-gimbal mechanic: https://www.youtube.com/watch?v=6yx700AdzLI
Tri-tier manipulator: https://www.youtube.com/watch?v=Hf_4iocFD0k / https://www.youtube.com/watch?v=vNV2LetkfEg
Tiny SBC display: https://www.youtube.com/watch?v=XaxYSqeFJ6w / https://www.lilygo.cc/products/t4-s3 / https://www.lilygo.cc/products/t-display-s3?bg_ref=7LJo9u5wwo / https://www.youtube.com/watch?v=j8THAc1sMww / https://www.youtube.com/watch?v=u5unB24lhC4 / https://www.youtube.com/watch?v=AXSOZC590mc / https://www.youtube.com/watch?v=rW-KyhtE5l8
Even more robot balls: https://www.youtube.com/watch?v=woVBqcJtyD0 / https://www.youtube.com/watch?v=h_1I-x847ls
uppy downy: https://www.youtube.com/watch?v=lpcIuSVLnSg
precise control DIY surgical bot: https://www.youtube.com/watch?v=d_8rHKrwr-Q / https://www.thingiverse.com/thing:3007261 / https://www.ebay.com/sch/i.html?_nkw=intuitive+surgical
stealth gom jabbar idea: https://www.youtube.com/watch?v=IQcEFHvocRc
excessive assembly: https://www.youtube.com/watch?v=lh93FayWHqw
cheaper printing inputs: https://www.youtube.com/watch?v=eWgzi4a1bJo
tentacles: https://www.youtube.com/watch?v=z28Bp8uFvVQ
actuators / qdd: https://www.youtube.com/watch?v=gxXatMr0LX4 / https://www.youtube.com/watch?v=GakFB8Tdd98 / https://www.youtube.com/watch?v=VhUvoV5XyRg
omnidirectional wheels: https://www.youtube.com/watch?v=OIdMkZyhx7E
inventory: https://www.servocity.com/servos-accessories / https://www.sparkfun.com/search/results?term=servos / https://www.motionrc.com/collections/servos / https://www.robotshop.com/collections/servo-motors
So what’s a good comprimise between building $600 robot joints (impractical if you want 16+ joints per consumer robot) versus tiny powerless RC servos designed for toys? How many toy servos can you stack and train end-to-end in a body to escape the big-build-up-front problems?
Even with hobby servos, the usable price floor is between $10 to $20 each depending on the quality you need. The price of total servos required alone brings us to $400 to $800 just in motorized parts before even considering a frame and other logic for powering and controlling everything (of course, you could always reduce BOM by chopping robot size: maybe you don’t need 36 joints per robot? maybe you don’t need six arms per robot?).
why not more things
The state of robotics hardware falls into three categories:
- industrial single-purpose robots at industrial prices ($50k to $200k+ per robot)
- research or hobby projects with hand-created 200 to 3,000 parts made in one-off batches ($3k to $50k+ per robot plus 800+ hours assembly each)
- single-purpose teaching / dev / demo robot toys ($300 to $2k per robot)
There’s a robotics gap between high-end experimental dev platforms and every day practical usage without going full corporate labor replacement bot. No, your pet roomba doesn’t count. also lol and whatever this joke is — and FYI: never tell a robot “make me a cup of coffee” unless you’re ready to be converted into coffee yourself.
Where’s the equivalent of a robot capable of doing home chores but actually works and doesn’t cost $50k to $100k each? What’s the equivalent of a robot to clean every sidewalk in your city every day to prevent any of those weird dark gum blobs all over the sidewalks? What’s the equivalent of a robot doing daily yard work and picking up every fallen leaf by hand delivering it to your compost pile? We have a society gap between work too trivial for people to do every day versus too unimportant for expensive robots to do. There’s a missing middle robot gap where we need cheap+functional instead of cheap+toy or expensive+powerful.
All the “big money big robot” labs appear to be focused purely on high-end expensive ego-driven robot platforms. Every labs wants to create the shinest highest powered most expensive most flexible platform we spared no expense. Except, such designs mean nothing ever gets deployed at scale. I’d rather have 500 cat sized spider bots priced at $500 each and operating via a remote hive mind at my disposal than just a single bumbling humanoid robot costing $50,000 each and only living for 8 minutes on battery power before it collapses and causes $12,000 of damage to itself.
We live in a golden age of tech hardware making. You’ve never had access to a wider variety of more capable development plug-and-go ecosystem prototyping platforms yet there isn’t a widespread pipeline of new products and capabilites being generated from our global glut of plug-and-play hardware development capabilities.
Look at this little guy: https://shop.m5stack.com/products/m5stack-nanoc6-dev-kit — it’s a fully assembled SoC board having wifi and bluetooth and zigbee and threads (so built-in peer-to-peer mesh networking support) about the size of a USB-C port and it costs less than $6 (the actual SoC itself is $2 and even better ones are less than $2 each if you’re building your own boards, so you’re paying $2 for the SoC then $4 for the USB port, PCB, case, connectors, and assembly).
There’s such an unexplored space of hardware platforms to design and build and grow to market yet the will-to-build isn’t showing up. What’s the missing middle where we start launching new hardware products again as quickly as every weird person builds “uber for dogs for doordash for wework for instacart for twitter?” wow, such genius, here’s $4 billion in overnight funding for your pre-revenue company!
build more things using real things for real world use cases.